
E’ tempo di “Dolcetto o scherzetto”… ma quanti golosi!
Fate in modo che ci siano dolci per tutti e che nessuno ne prenda più del necessario: questo divertente progetto vi permetterà di costruire un sanguinolento braccio mozzato che colpirà le mani di chiunque vorrà afferrare troppe caramelle!
Cosa occorre
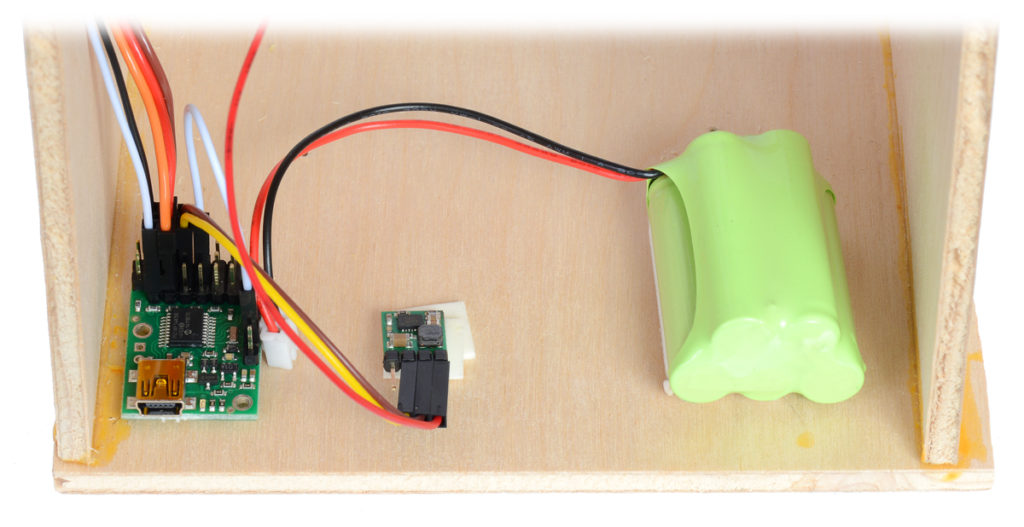
- 1x Micro Maestro 6-Channel USB Servo Controller
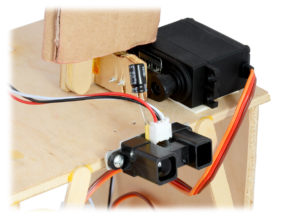
- 1x Servo standard Power HD HD-1501MG
- 1x Sensore di distanza Sharp GP2Y0A41SK0F
- 1x Regolatore di tensione Step-Down D24V6ALV
- 1x condensatore 100uF
- 1x cavo JST 3-pin per il sensore di distanza
- 1x braccio mozzato di plastica
- 1x pacco batteria da 6V
- Tavolette di legno
- Nastro biadesivo
- Colla per legno
1. Struttura meccanica
La struttura di base è formata da un’asse di legno abbastanza spessa e robusta da poter sollevare il braccio e della giusta lunghezza per far cadere il braccio esattamente sopra la ciotola di caramelle; la base per la ciotola deve essere lunga a sufficienza per stabilizzare il peso di tutta la struttura, anche quando vi si poggerà la ciotola piena di caramelle; il tutto va assemblato con della colla per legno. Per collegare il servomotore al braccio, serve un’altra sottile striscia di legno alla quale va avvitato il servomotore stesso.
Per alimentare il progetto occorre un pacco batteria da 6V; è necessario inoltre un Regolatore di tensione Step-Down D24V6ALV, dal momento che la scheda Micro Maestro non può fornire la corrente sufficiente per il sensore di distanza; infine, sui cavi di alimentazione del sensore, è stato saldato un condensatore da 100uF per la riduzione del rumore.
2. Programmazione dei movimenti
Questo progetto parte dall’idea di azionare il movimento di un servomotore tramite un Sensore di distanza Sharp GP2Y0A41SK0F e una scheda controllo motori Micro Maestro 6-Channel USB Servo Controller.
Un servomotore adatto a questo progetto necessita di una coppia in grado di fare leva sul braccio e di muoverlo; è stato perciò utilizzato un Servo standard Power HD HD-1501MG.
Qui di seguito, viene riportato un codice di esempio per il Micro Maestro:
8000 1 servo # initializes servo position
1000 delay # waits 1 second for servo to reach position
0 1 servo # saves power by not sending pulses to servo
begin
0 get_position
250 greater_than if # check for trick-or-treater
4000 1 servo # swing arm down
3000 delay # wait 3 seconds
8000 1 servo # return to initial position
1000 delay
0 1 servo # power saving
30000 delay # wait 30 seconds before allowing the arm to swing again
endif
repeat
N.B.: anche se il servomotore si muove lentamente e la lunghezza del braccio permette di limitare la coppia che il servomotore può esercitare, è necessario porre molta attenzione affinchè la struttura non cada con troppa forza sulla ciotola di caramelle.
3. Modifiche e miglioramenti
Un possibile miglioramento prevede l’aggiunta di decorazioni che nascondano le parti elettroniche; è anche possibile sostituire il braccio insanguinato con una caramella gigante o con altri tipi di decorazioni a tema suggerite dalla vostra fantasia!