
Questo ragno animato donerà una nuova atmosfera alle vostre decorazioni per Halloween!
La preparazione è semplice: una scheda controllo motori pilota un servomotore a rotazione continua che fa muovere un ragno di plastica in alto e in basso, con l’aiuto di un interruttore switch.
Cosa Occorre
- 1x Micro Maestro 6-Channel USB Servo Controller
- 1x Servo Robot Power-HD AR-3606HB – Rotazione continua
- 1x Lama Frontale per Zumo Chassis
- 1x Microswitch – Microinterruttore con leva
- 4x batterie stilo AA
- 1x supporto per 4 batterie AA
- 1x distanziatore o qualsiasi altra guida per il movimento dello spago
- 1x spoletta vuota
- 1x ragno di plastica
- 1x spago
- bastoncini da gelato
Possibili modifiche nella scelta dei componenti utilizzati
Applicando delle piccole modifiche alla struttura, sarà possibile utilizzare anche un microswitch senza leva disponibile al seguente link. La struttura dovrà essere modificata facendo in modo che, con il movimento verso l’alto, venga premuto l’interruttore presente sul microswitch.
1. Assemblaggio
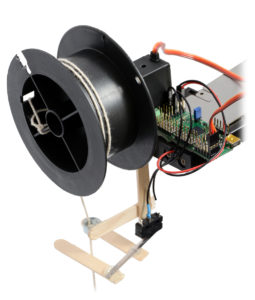
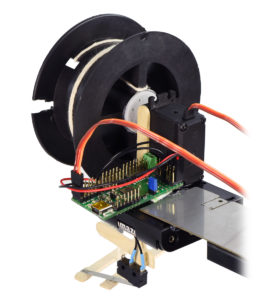
Questo divertente progetto sfrutta l’azione di un Servo Robot Power-HD AR-3606HB a rotazione continua per far muovere in su e in giù un ragno di plastica legato ad uno spago bianco. Lo spago viene avvolto ad una spoletta collegata al servomotore tramite l’utilizzo della staffa in dotazione al servomotore stesso ed il tutto viene infine controllato da un Micro Maestro 6-Channel USB Servo Controller . Il servomotore e il Micro Maestro vanno fissati ad un supporto batterie con un po’ di colla a caldo e del nastro biadesivo.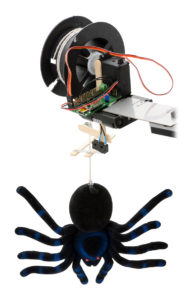
Il Microswitch permette di interrompere la risalita del ragno per poi farlo tornare verso il basso e va fissato sotto alla spoletta con dei bastoncini da gelato. Per collegare lo switch al Micro Maestro sono stati utilizzati dei cavetti con terminale femmina; nello specifico, lo switch è collegato ad uno dei canali della scheda controllo motori dotati di resistenza interna di pull-up.
Infine, la Lama frontale per Zumo Chassis è stata fissata al supporto per batterie in modo da facilitare il montaggio dell’intera struttura su una superficie piana parallela al pavimento.
2. Programmazione scheda Micro Maestro
Qui di seguito viene riportato un semplice codice di esempio per la programmazione del Micro Maestro che permette il movimento del ragno in salita e in discesa.
begin 6000 0 servo #set the servo to zero speed 20 get_position while #wait until the switch is pressed to begin repeat 8800 0 servo #set a target speed 500 delay #small delay in case of switch bouncing begin 20 get_position logical_not if #wait until the switch is pressed to switch directions 0 get_position 8800 equals if 3200 0 servo else 8800 0 servo endif 1000 delay #small delay in case of switch bouncing (or the spider hitting multiple times) endif repeat
3. Suggerimenti
Il peso del ragno in movimento potrebbe far oscillare troppo lo spago mancando così il contatto con lo switch. Per prevenire questo problema, è sufficiente costruire una guida utilizzando un distanziatore che permette allo spago di mantenere un movimento stabile; in questo modo, la corsa dello spago viene limitata all’interno dei due bastoncini da gelato che fissano lo switch alla struttura permettendo così al progetto di funzionare con il corretto movimento.