Questo kit di montaggio permette di costruire il Braccio Robotico Tinkerkit: un braccio robotico con pinza dalle innumerevoli possibilità, che può essere assemblato in moltissimi modi. Oltre a tutti i componenti necessari alla realizzazione del Braccio Robotico, questo kit contiene un manuale (disponibile anche in versione PDF) con istruzioni di montaggio semplici e dettagliate.
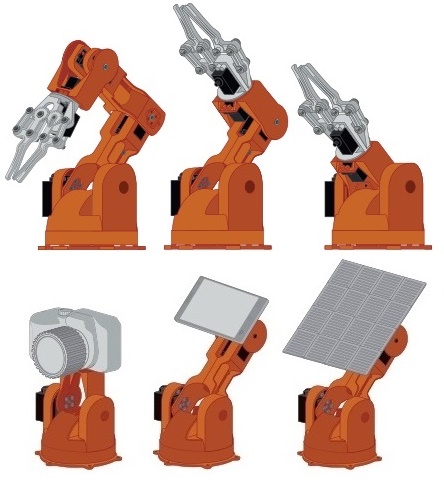
Il braccio può essere assemblato in numerose versioni, alcune delle quali illustrate nell'immagine sotto riportata. Grazie alla sua versatilità, il braccio Robotico Tinkerkit è in grado anche di manipolare numerosi oggetti: ad esempio, è possibile utilizzare il braccio robotico per sorreggere una fotocamera, uno smartphone o un tablet e persino un piccolo pannello solare.
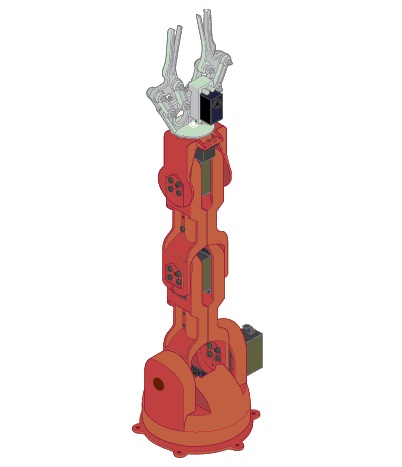
All'interno della guida è disponibile uno sketch chiamato "testBraccio90", tramite il quale si può regolare l'allineamento di tutti i motori. Lo sketch orienterà il Braccio Tinkerkit nella posizione verticale (come illustrato nell'immagine sotto riportata); nel caso in cui questo non avvenga, è necessario riallineare i servi, come indicato nella guida.
Il kit di montaggio per il Braccio Robotico Tinkerkit include quattro servomotori SpringRC SR431 e due servomotori SpringRC SR311, le cui caratteristiche sono evidenziate nella sezione "Specifiche" in fondo alla pagina. E' presente inoltre una shield che permette di controllare e gestire i servomotori direttamente tramite una scheda Arduino.
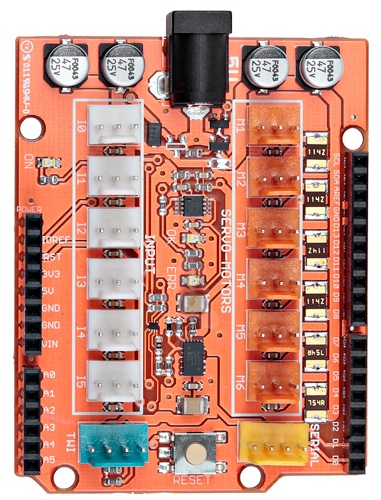
La shield dispone di 12 connettori Tinkerkit standard 3-pin e 2 connettori Tinkerkit 4-pin direttamente collegati ai pin Arduino, come specificato nella tabella sotto riportata.
Connettori Tinkerkitarancioni (M1 ~ M6): collegati alle uscite PWM della scheda Arduino a cui si possono connettere i servomotori per la gestione della movimentazione del braccio; ognuna di queste connessioni dispone di un fusibile di protezione: i connettori da M1 a M4 vengono limitati a 1.1A, mentre i connettori M5 e M6 vengono limitati a 750mA.
Connettore Tinkerkit 4-pinazzurro (TWI): permette ad una scheda Arduino di comunicare con i dispositivi che supportano il sistema TWI (Two Wire Interface) o il protocollo I2C (Inter-Integrated Circuit) tramite libreria Arduino Wire; sul connettore sono presenti anche i pin GND e 5V, oltre a quelli necessari per la comunicazione (SDA, SCL). ATTENZIONE: poichè la scheda Arduino UNO utilizza per la comunicazione I2C i pin analogici 4 e 5 (A4 e A5), l'uso del connettore Tinkerkit TWI precluderà l'accesso ai relativi pin di input analogici presenti sulla shield (connettori I4 e I5).
Connettore Tinkerkit 4-pin giallo (SERIAL): riporta i segnali che permettono alla scheda Arduino di comunicare con altri dispositivi che supportano la comunicazione seriale; sul connettore sono presenti anche i pin GND e 5V, oltre a quelli necessari per la comunicazione (RX, TX). ATTENZIONE: nel caso in cui si stiano trasmettendo o ricevendo dati da e verso il computer, non è possibile l'utilizzo del connettore SERIAL per la comunicazione con dispositivi esterni.
La shield dispone inoltre di un pulsante di reset e di tre LED indicatori di stato: LED ON (verde) che segnala lo stato di accensione della shield; LED OK (verde) che segnala la corretta alimentazione della shield; LED ERR (rosso) che segnala un'errata alimentazione della shield.
Un'importante caratteristica di questa shield è la presenza di un connettore jack che permette di separare l'alimentazione dei servomotori da quella che si fornisce alla logica della scheda Arduino. Si raccomanda quindi di alimentare la shield tramite l'alimentatore a tensione regolata (5V DC@5000mA) incluso nella confezione.
Questa shield è compatibile con le seguenti schede:
Arduino UNO
Arduino Leonardo
Arduino Due
Arduino Yun*
Arduino Ethernet
Arduino Leonardo ETH
Arduino Mega 2560
Arduino Tian*
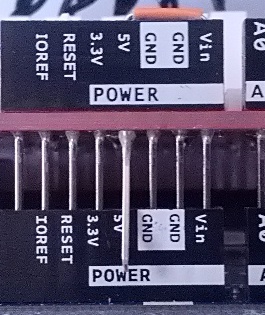
Utilizzando alcune delle schede Arduino riportate nella tabella, è possibile controllare in rete il Braccio Robotico, tramite PC o Smartphone, come illustrato dalla seguente demo. *N. B. per Arduino YÚN e Arduino Tian, la compatibilità è possibile effettuando un ponte tra i pin 5V e VIN della shield, come mostrato nell'immagine di sinistra (nel caso in cui si effettui il ponte tra questi due pin, non è più attiva la protezione fornita dal regolatore di tensione presente sulla shield). Inoltre, per evitare il surriscaldamento della scheda Yun o Tian è necessario prolungare il pin 5V fuori dal connettore, come illustrato nell'immagine di destra.
ATTENZIONE la distanza fra i pin 7 e 8 è pari a circa 4mm: valore che non è multiplo del passo standard (2,54mm)
Contenuto della confezione
Come illustrato nell'elenco sotto riportato, il kit di montaggio è composto da tutto ciò che è necessario per la costruzione di un Braccio Robotico Tinkerkit:
21x componenti in materiale plastico
4x servomotori SR 431
2x servomotori SR 311
1x shield Arduino-compatibile
1x alimentatore 5V – 5A
1x cavo a spirale schermato
63x viti
16x guarnizioni piatte
7x dadi esagonali
2x molle
1x chiave a doppio anello esagonale
1x cacciavite Phillips
Specifiche
Braccio Robotico Tinkerkit (assemblato):
Range di distanza operativa (max): 80cm
Capacità di carico (distanza operativa 32 cm): 150g
Capacità di carico (in configurazione minima): 400g
Questo sito e gli strumenti terzi da questo utilizzati si avvalgono di cookie necessari al funzionamento ed utili alle finalità illustrate nella Informativa Cookie. Se vuoi saperne di più o negare il consenso a tutti o ad alcuni cookie, clicca su "Maggiori informazioni".
L’utilizzo di questo sito, la navigazione verso altre pagine o la chiusura della presente finestra rappresentano un esplicito consenso all’uso dei cookie.Cookies help us deliver our services. By using our services, you agree to our use of cookies.Maggiori informazioniRead more